Sting Operation
103 words | ~ 1 min read | Jun 12, 2020 | last modified Jun 12, 2020 | projects robotics
Sting Operation is a homebrew telepresence robot; my original intent was to use it to attend robot club when I’m away at MIT. Currently, it’s outfitted with a Neato BotVac LiDAR, a Raspberry Pi running ROS, and a PyBoard controlling the motors and LIDAR. An iPad mounted on a tripod lets me FaceTime the robot.
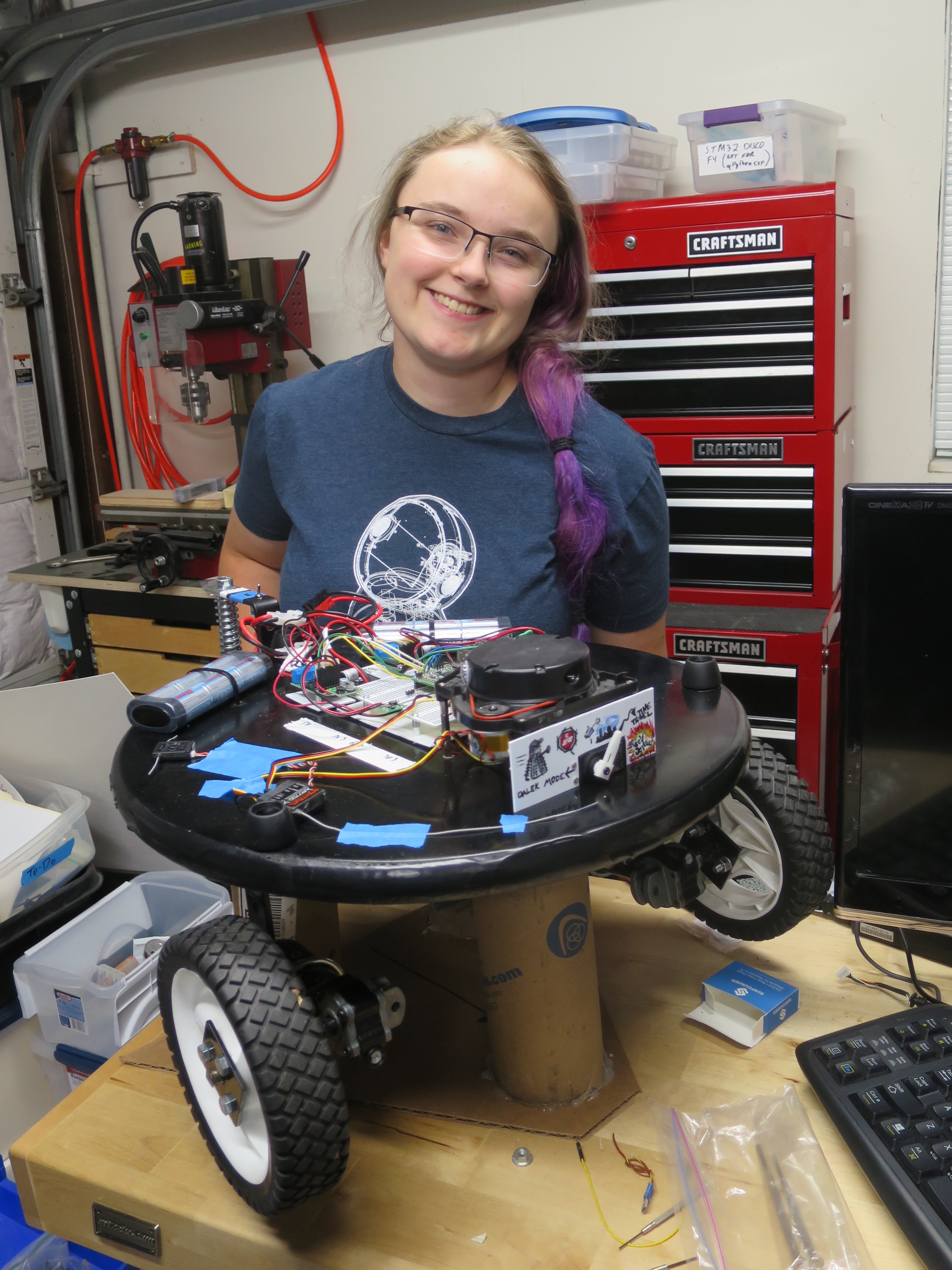
Pictured above: Sting Operation base (minus tripod). It’s a two-wheeled base with a castor wheel. There is also a RC receiver that can be used for local teleoperation, and a dial on the front of the robot indicating its state (under remote control, under local control, stopped, etc).